
 手机网站
手机网站
手机网站
手机网站
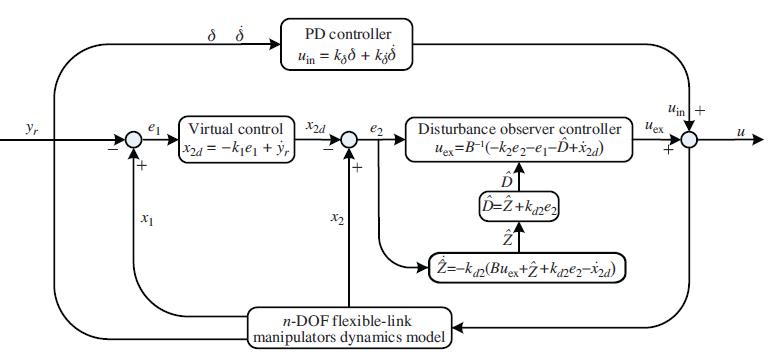
由于柔性机械手具有复杂的动力学模型,因此不可避免存在参数不确定性和未建模动态。首先介绍了基于特征模型的全系数自适应控制理论和方法的发展情况,然后基于特征建模

基于自适应神经网络的柔性机械手变结构控制系
800x1131 - 323KB - PNG

清华大学物理系
400x228 - 1921KB - OTHER

漂浮基柔性空间机械臂协调运动的非线性鲁棒自
1457x2038 - 1362KB - PNG

重复定位精度达0.1mm,SRT软体机器人一手应
604x402 - 31KB - JPEG

气动驱动柔性臂模糊自适应振动控制研究.pdf
800x1131 - 323KB - PNG
科学网-柔性机械臂高精度控制研究取得新进展
783x359 - 30KB - JPEG

【搬运机械手、高性能助力搬运机械手、高效率
680x374 - 21KB - JPEG

贝加莱推出柔性电驱输送系统SuperTrak 智能制
561x374 - 261KB - PNG

重复定位精度达0.1mm,SRT软体机器人一手应
880x587 - 61KB - JPEG

基于LabVIEW的四自由度机械臂运动控制系统
373x364 - 10KB - JPEG

贝加莱推出柔性电驱输送系统SuperTrak 智能制
558x371 - 19KB - JPEG

塑料机械业涅盘后或迎来新发展机遇_买卖机械
550x471 - 26KB - JPEG
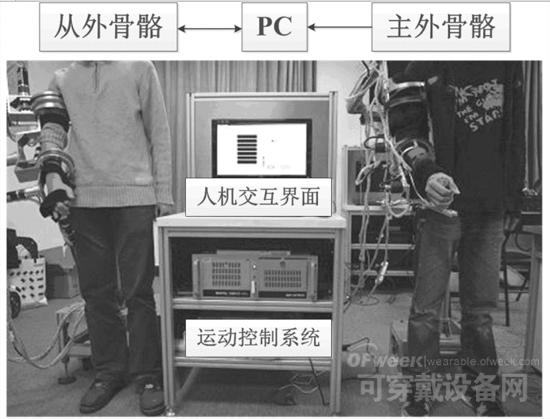
运动自适应智能外骨骼机器人系统研发 - OFwe
550x419 - 38KB - JPEG

【太平洋机械】行业深度报告:触手可及的机器
550x350 - 7KB - PNG

【国家自然科学基金】_移动机械臂_基金支持
676x1092 - 106KB - JPEG
