
 手机网站
手机网站
手机网站
手机网站
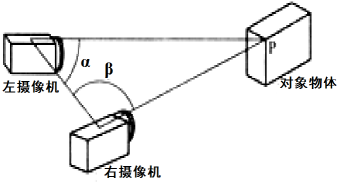
如题,请详细解释一下三角测量法的原理和推导公式,跪谢!本人最近在研究机器人定位方 我想你的机器人定位方法用的应该指的是视觉定位吧?所以关键在于求出目标和传感器
机器视觉-结构光测量之三角测量原理_zhliang
285x223 - 16KB - JPEG
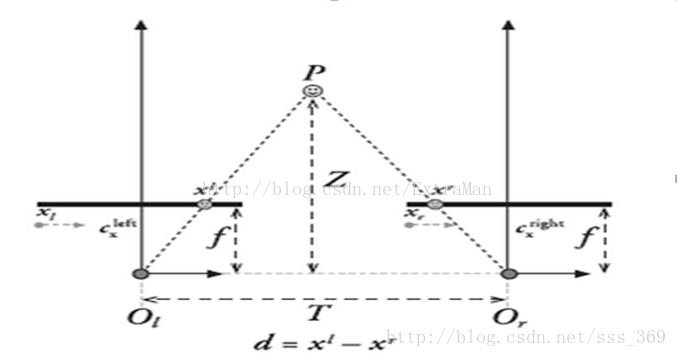
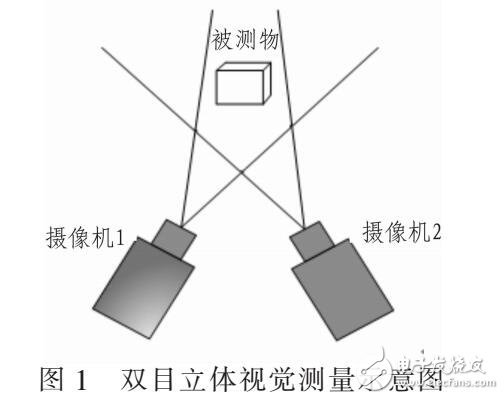
双目视觉:三角测量原理
677x357 - 57KB - PNG

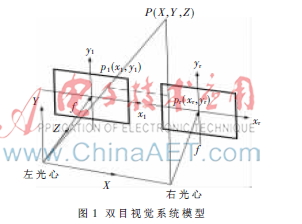
双目视觉:三角测量原理
433x286 - 77KB - PNG

主动视觉测量方法:激光三角法
404x388 - 32KB - JPEG

三角测量法的激光位移
438x343 - 25KB - JPEG
基于机器视觉的板件形位测量-AET-电子技术应
302x224 - 43KB - JPEG
走进生活的机器人
340x182 - 18KB - PNG
3D激光三角测量工业相机-高速工业相机 3D工
230x202 - 12KB - JPEG

基于旋转对称三角测量视觉传感器的高分辨率三
800x1168 - 329KB - PNG
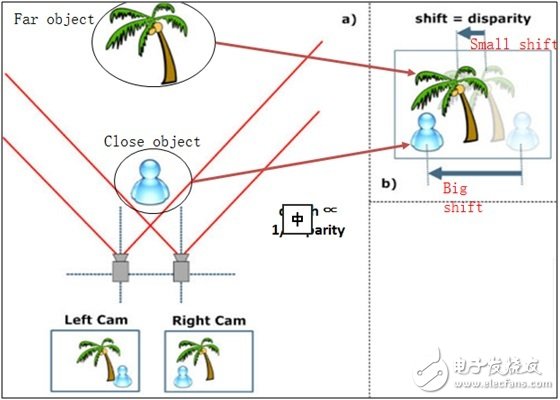
视觉方案做ADAS,单目和双目到底有什么差别
560x400 - 38KB - JPEG

双目视觉技术解析
400x292 - 26KB - PNG
可应用与复杂曲面快速自动检测的双目立体机器
504x399 - 20KB - JPEG

3D激光三角测量工业相机-高速工业相机 3D工
433x229 - 30KB - JPEG

仿生计量学的新领域视觉坐标测量机
320x241 - 11KB - JPEG

基于视觉测量技术构建针织线圈三维结构 Stud
800x1092 - 263KB - PNG
