
 手机网站
手机网站
手机网站
手机网站
摘要:为研究SCARA机器人的轨迹规划,在MATLAB环境下,对该机器人运动学参数进行了 并对机器人的轨迹规划进行了仿真.通过仿真,直观地显示了机器人关节的运动,得到了连

RB002 机器人关节SCARA机器人 - solidworks
520x551 - 90KB - PNG

scara型 机器人仿真 避障算法的研究 scara型 机
452x435 - 31KB - JPEG
SCARA型机器人仿真避障算法的研究
319x215 - 9KB - GIF

经济型四自由度SCARA机器人RBT-4T03S-产品
312x299 - 10KB - JPEG

四自由度SCARA机器人运动仿真分析(含CAD图
992x1402 - 66KB - PNG

SCARA机器人运动学分析及MATLAB建模仿真
800x1090 - 340KB - PNG
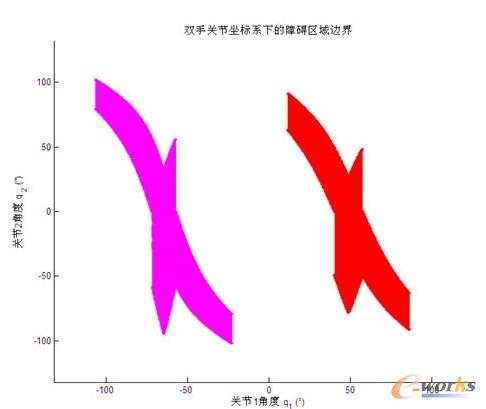
SCARA机器人二维避障的智能控制算法与仿真
486x409 - 14KB - JPEG
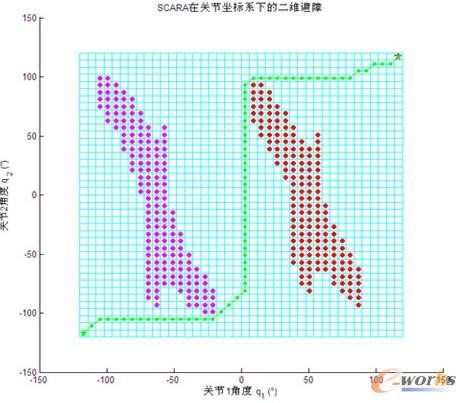
SCARA机器人二维避障的智能控制算法与仿真
466x403 - 35KB - JPEG
SCARA型机器人仿真避障算法的研究
310x220 - 1KB - GIF

CRT工业机器人控制代码的碰撞检测_工业自动
304x231 - 12KB - JPEG
于MATLABRobotics工具箱的SCARA机器人轨
800x1177 - 357KB - PNG

基于ADAMS的SCARA机器人运动学仿真研究
959x1293 - 467KB - PNG

SCARA机器人运动学分析及MATLAB建模仿真
756x1047 - 160KB - PNG

SCARA工业机器人轨迹规划与仿真研究.pdf
800x1131 - 123KB - PNG

类SCARA 并联机器人机械臂动态分析与仿真
581x257 - 7KB - PNG
